I graduated from DTU with a B.Tech in Electrical and Electronics Engineering, though some of my best learning happened outside the classroom -- picking up coding through self-assigned projects and a curiosity for building things. By final year, that curiosity had turned into a gesture-controlled robot that could avoid obstacles and pick and place objects, which I eventually published as a research paper in 2024.
After graduating, I spent five years at Ericsson working on mobile financial services infrastructure across African countries - fast-paced, international work that taught me how large-scale systems actually operate. I am now pursuing my MS in Computer Science at Arizona State University, Tempe.
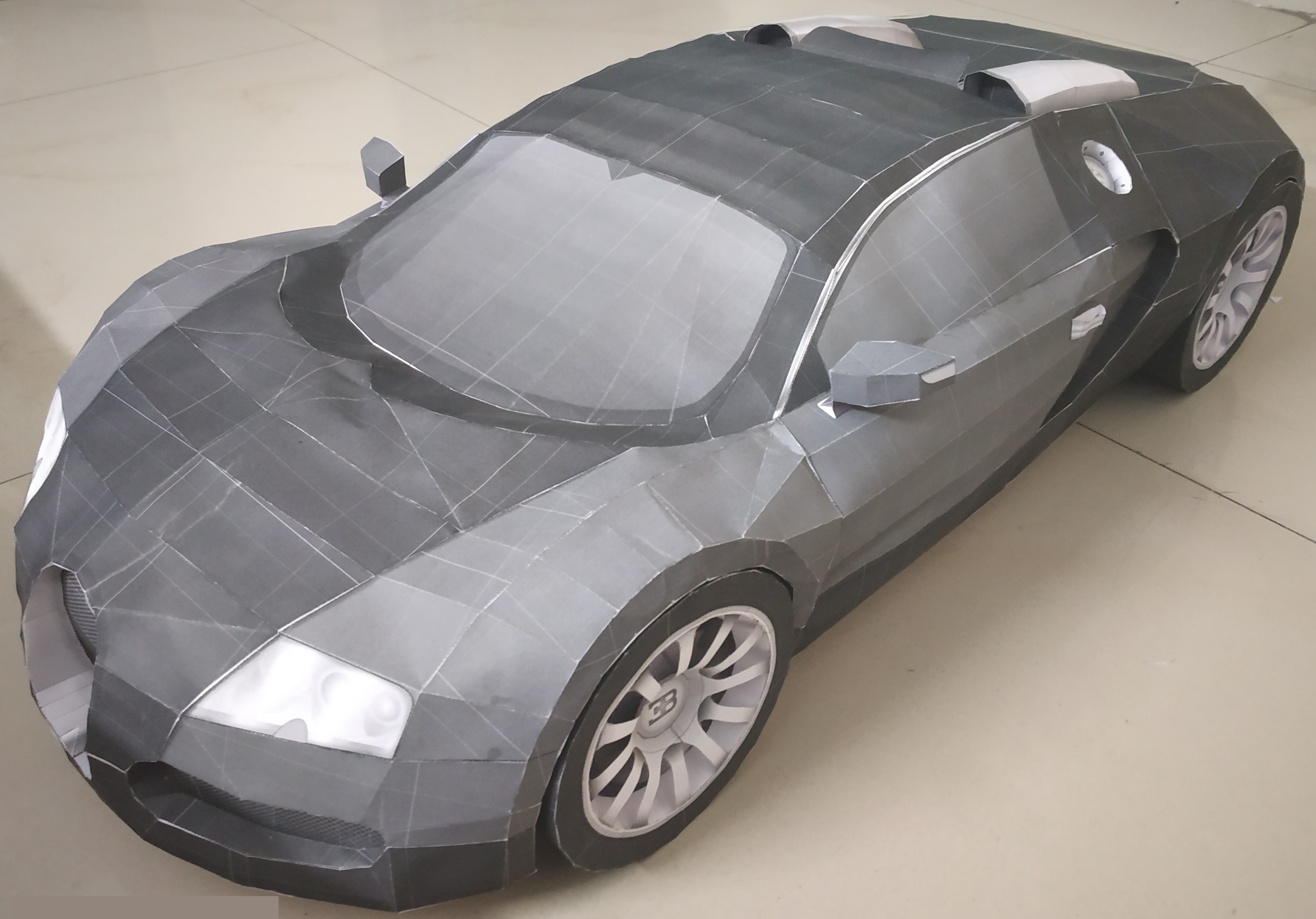
Outside of work and academics, I like to sketch, do paper crafting, and produce electronic music on FL Studio. Some of that is on display in the Extra Curricular section below.
A mix of what I picked up through work, academics, and
just tinkering around.
Experience gained from working in different institutions.



A mix of academic work, personal experiments, and things I built
just to see if I could.
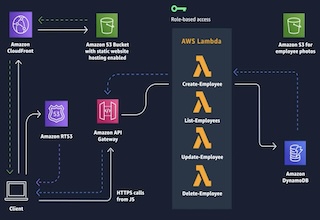
Designed and deployed a scalable, highly available web application on AWS, transitioning from an EC2-based architecture to a fully serverless design.
Backend built with AWS Lambda and API Gateway; data stored in DynamoDB; static assets served via S3 and CloudFront for global low-latency delivery.
Deployed in a multi-AZ VPC with IAM roles and Auto Scaling for fault tolerance and security.
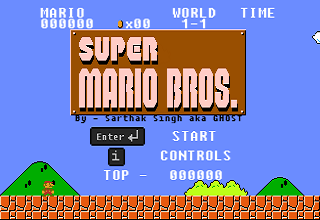
Used Pygame module in Python to blit images from ‘Super Mario Bros.’ sprites and replicated world 1 x 1 of the game.
Used different classes for the items (e.g. pipe, hole, bricks), the Mario character and the enemies, keeping track of the lives, score, coins and time count.
Making the game compatible to play with a keyboard by assigning the buttons to different functions using the Pygame inbuilt functions.
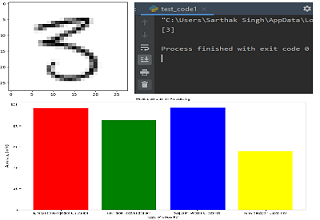
Imported the data for the training of the classifiers from the MNIST dataset and handled it using Pandas library.
Using Sklearn, imported the classifiers and trained them with 80% of the MNIST dataset.
Used Matplotlib to plot the predictions of the trained classifier instance, and later also used to compare the responses of different classifiers, trained similarly.
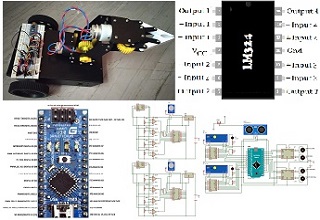
Used Arduino Nano for the robot’s microcontroller, Accelerometer for gesture response, Ultrasonic Sensor for obstacle analysis & RF Module for communication between the user and the robot.
Simulation was done using Proteus and later the hardware model was implemented on breadboard.
Research published in the International Journal of Engineering Research and Technology (IJERT), August 2024.

After setting up the HTML and bootstrap classes, custom CSS was mostly used for the whole website to make it responsive.
Standard Bootstrap and JavaScript CDNs were included for the base response and a custom JavaScript file has been made for personalised effects.
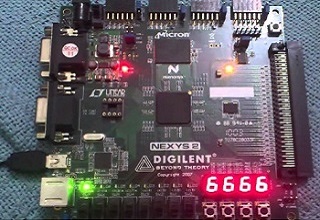
Using the 50 MHz clock input of the Spartan 3E board, made a 4-bit full adder to run the counter and display the sequence.
Included a reset switch to initiate the sequence again when its logic is 1 and made to run when its logic is 0.
Things I make when I am not writing code -
sketches, paper craft, and music.






Feel free to reach me by the below mentioned methods, or send
me a message by filling out the form below.